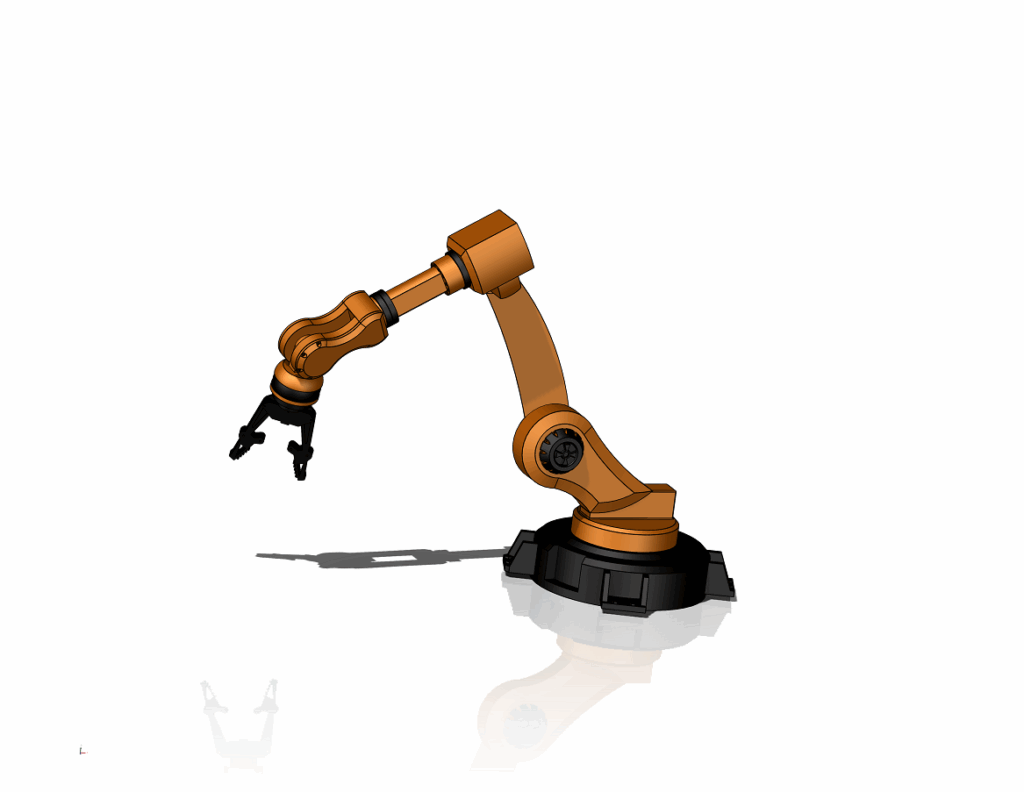
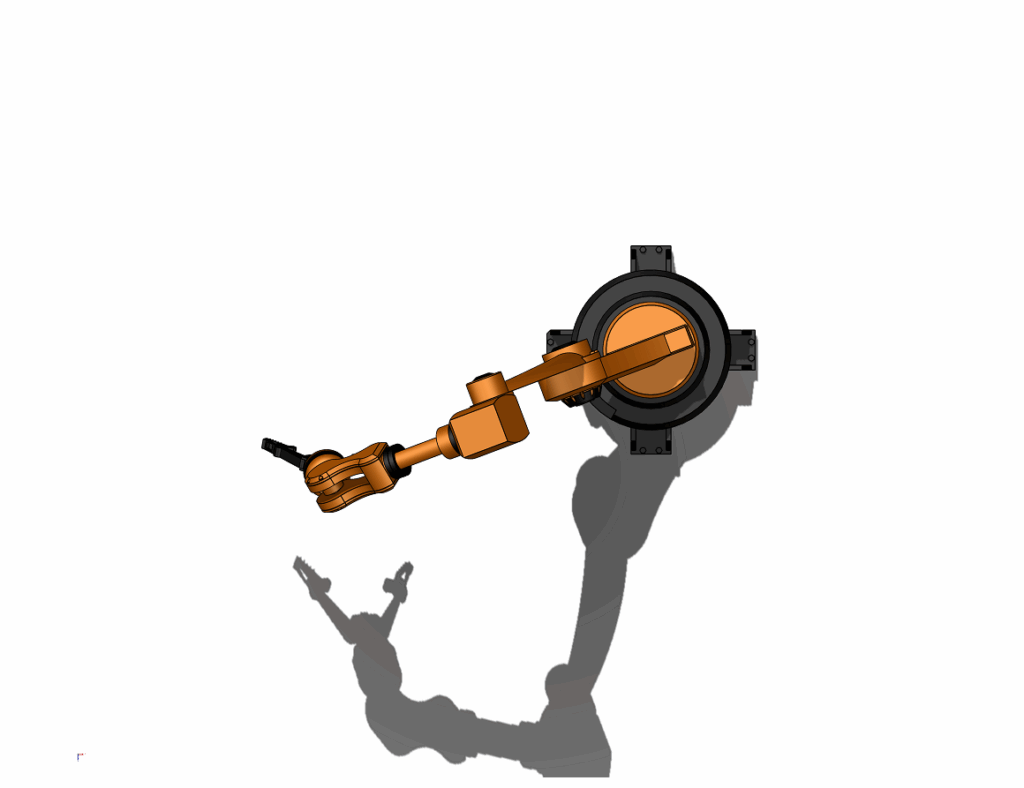
Robot arm ini dirancang sebagai prototype pemindah barang otomatis yang mengandalkan sistem servo motor multi-axis dan gripper mekanis. Proyek ini merupakan bagian dari inovasi mahasiswa Teknik Elektro dalam bidang otomasi industri, dengan fokus pada efisiensi gerakan, presisi, dan adaptasi terhadap lingkungan kerja nyata.
Spesifikasi
| Axis | Gerakan | Komponen Aktuator | Spesifikasi |
|---|---|---|---|
| 1 | Rotasi horizontal 360° | Servo Continuous (FS90R / MG996R) | 5–6V, 360°, Torque ±2.5–11 kg.cm |
| 2 | Naik turun vertikal 180° | Servo High Torque (MG996R / DS3218) | 6V, 180°, Torque ±10–20 kg.cm |
| 3 | Naik turun vertikal 180° | Servo Standard (MG995 / MG996R) | 6V, 180°, Torque ±10 kg.cm |
| 4 | Rotasi lengan 360° | Servo Continuous (FS90R / MG996R) | 5V, 360°, Kecepatan ±60 rpm |
| 5 | Gripper (buka/tutup penjepit) | Micro Servo SG90 / Pneumatik / Solenoid | 5V–12V, gaya jepit cukup untuk objek ringan seperti box, botol, dsb. |

Sistem Kontrol
- Mikrokontroler: Arduino UNO / ESP32
- Interface: Potensiometer / Joystick / Bluetooth Remote
- Power Supply: DC 5V–12V, modular adapter
- Safety: Emergency Stop + Power LED Indicator
Implementasi di Dunia Industri
- Pick and Place otomatis di lini produksi
- Penataan produk di gudang/logistik
- Penerapan untuk stasiun pengemasan otomatis
- Simulasi sistem kerja cobot (collaborative robot)
- Edukasi otomasi di kampus dan pelatihan industri
Potensi Pengembangan
- Integrasi kamera + AI (OpenCV) untuk deteksi objek
- Penggunaan IoT untuk kontrol jarak jauh
- Modul machine learning untuk adaptasi lintasan otomatis
- Sistem voice control atau gesture untuk presentasi interaktif
Prototype ini menjadi representasi awal dari inovasi mahasiswa dalam menciptakan teknologi otomasi sederhana namun aplikatif. Diharapkan, karya ini bisa menjadi pijakan untuk proyek lanjutan yang lebih kompleks dan mendalam, baik untuk kebutuhan industri 4.0, edukasi teknik, maupun wirausaha berbasis teknologi.