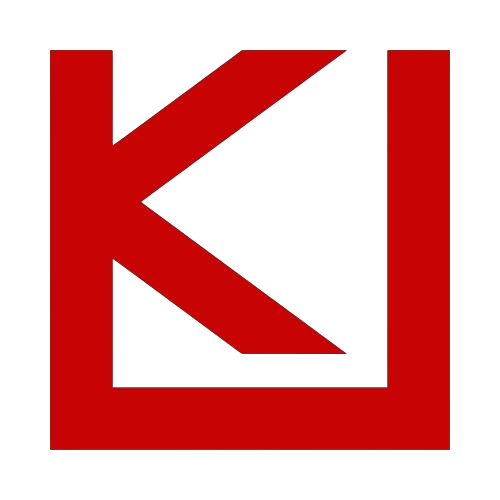
Project ini merupakan Prototype Welding Arm Robot 4 axis hasil rancangan mahasiswa Teknik Elektro, yang bertujuan untuk mensimulasikan proses otomatisasi pengelasan secara sederhana. Robot ini dirancang sebagai media edukatif untuk memahami interaksi antara desain mekanik, sistem kendali servo motor, dan mikrokontroler berbasis Arduino. Seluruh struktur dimodelkan menggunakan SolidWorks dan diuji melalui simulasi serta implementasi berbasis mikrokontroler.
Spesifikasi Teknis
| Komponen | Spesifikasi |
|---|---|
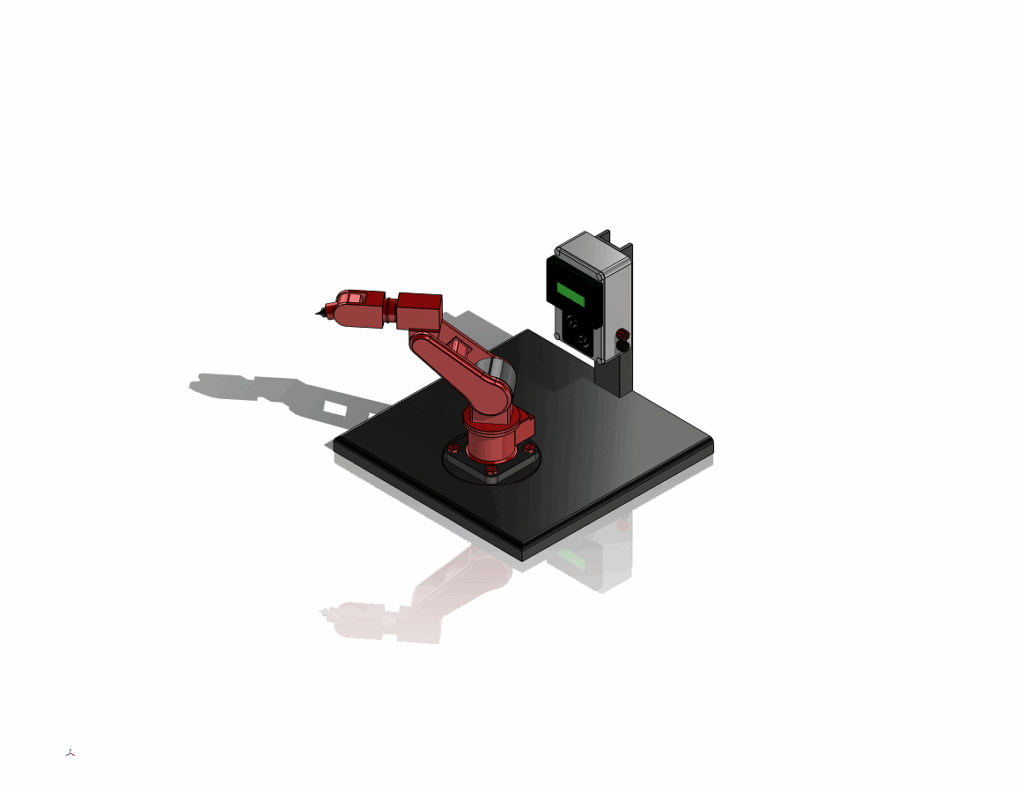
| Tipe Robot | Arm Robot 4 Axis (prototype edukatif) |
| Software Desain | SolidWorks (3D modeling & simulasi mekanikal) |
| Material Struktur | PLA/ABS hasil cetak 3D, dengan base MDF/besi ringan |
| Jumlah Axis | 4 (1 rotasi horizontal 360°, 3 artikulasi vertikal 180°) |
| Motor Sumbu 1 (Base) | MG996R Continuous Rotation (360°) – rotasi horizontal dasar |
| Motor Sumbu 2–4 | MG996R Standard 180° Servo – gerakan naik-turun lengan |
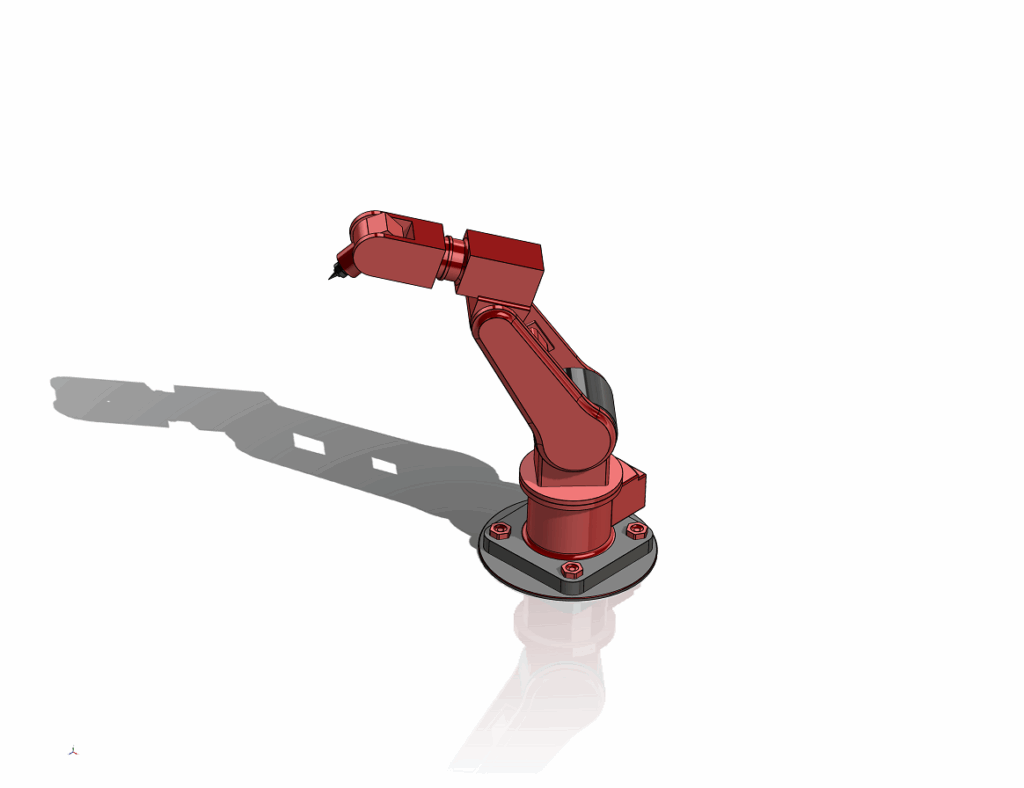
| Sistem Kontrol | Arduino Uno / ESP32 + Driver PWM (PCA9685 atau setara) |
| Panel Kontrol | LCD 16×2 + Tombol manual |
| Power Supply | Adaptor 12V DC + Buck Converter 6V 10A |
| Mode Operasi | Manual (tombol), preset (semi otomatis) |
| Area Kerja | ±30 x 30 cm |
Simulasi & Pengujian
- Pergerakan sumbu berhasil divalidasi melalui simulasi dan uji nyata.
- Motor 360° pada sumbu dasar bekerja stabil untuk rotasi penuh.
- Servo mampu mengangkat beban ringan seperti pena atau torch tiruan.
- Diuji untuk pengendalian sudut dan torsi dasar menggunakan Arduino IDE.
Tujuan Edukatif
- Mengaplikasikan teori servo motor, sinyal PWM, dan sistem kendali tertanam.
- Praktik integrasi mekanik, kelistrikan, dan pemrograman mikrokontroler.
- Media pembelajaran nyata untuk robotika dasar dan otomasi industri kecil.
- Cocok untuk tugas akhir, praktikum, atau pelatihan mandiri.
Potensi Pengembangan
- Tambahan sensor feedback posisi (rotary encoder).
- Pengendalian nirkabel via Wi-Fi / Bluetooth.
- Pengembangan kontrol otomatis dan looping gerakan.
- End-effector modular: grabber, laser pointer, extruder, dll.
- Upgrade ke motor stepper untuk torsi dan presisi lebih tinggi.
Integrasi Interdisipliner
- Teknik Elektro → sistem kendali, motor, dan mikrokontroler.
- Teknik Mesin → struktur, sambungan, perhitungan torsi.
- Teknik Informatika → antarmuka pengguna & sistem otomasi.
Kesiapan Industri 4.0
- Cocok sebagai perkenalan otomasi industri berbasis servo control.
- Dapat digunakan untuk simulasi cobot (collaborative robot).
- Potensi integrasi ke sistem IoT monitoring dan pemrograman cloud.
Aplikasi Nyata (Jika Dikembangkan)
- Robot edukasi di SMK / Politeknik.
- Unit simulasi pengelasan otomatis mini.
- Robot pick & place atau perakitan ringan.
- Sistem end-effector untuk printer 3D atau cutting ringan.
Keberlanjutan & Efisiensi
- Komponen low-cost dan open-source
- Dapat dicetak ulang jika rusak
- Modular dan mudah dikembangkan oleh tim pemula
- Ideal untuk kampus dan pelatihan robotika dasar
Prototype Welding Arm Robot adalah contoh nyata penerapan ilmu teknik elektro dan robotika dalam bentuk sederhana namun aplikatif. Meski masih dalam tahap prototype edukatif, proyek ini membuka peluang besar untuk diterapkan sebagai media pembelajaran, pengembangan penelitian mahasiswa, maupun dasar inovasi industri masa depan.